
Salto has been one of our favorite robots since we first introduced ourselves In 2016 As a project from Ron Fearing Laboratory in UC Berkeley. A jumping robot with the spring content of the palm of the palm can barely combine several jumps with an open loop to Master landing,, Jumping out,, Dusing our service racesand Sometimes exploding.
What is quite unusual about the flue is that it is still an active research project – nine years is a wonderfully long life for every robot, especially without extremely obvious practical applications. But one of the original creators of the salt, Justin yim (Who is a professor at the University of Illinois), he found a niche where the flue could do what no other robot could: Mid-air sample of water gejones from the cold surface of Engodus, the moon Saturn.
What makes Engadad so interesting is that it is complete covered with an ice thickness of 40 kilometers, and under this ice is 10 km deep global ocean. And in this ocean you can find – we don’t know what. Diving in this buried ocean is drained Robots can be able to solve at some pointBut in the nearby (ER) term, the Engodus South Pole is home above the hunger strike, which spews feathers of water vapor and all kinds of other things directly from the space and offers the possibility of sampling to each robot that can close to the sip.
“We can cover wide distances, we can get through obstacles, do not require the atmosphere and pollute anything.” —Justin Yim, University of Illinois
Yim, along with another veteran Salto Ethan Schaser (Now on JPL), they received funds through the NASA program of innovative advanced concepts (NIAC) to turn a flue into a robot that can carry out a “legged survey across the cloud” or only into a slightly slightly rolled bacronym, Leap. Leap would be a space version of a salt with several important modifications that would allow it to function in a freezing environment without air, low gravity.
Examination of difficult terrain endadus
How best we can recognize from the pictures it takes during Cassini Flybys, the surface of Engaredus is hostile to traditional rover, covered with ridges and cracks, although we do not have much information about precise suitable fields. There is also no atmosphere, which means that you can use aerodynamics, and if you use missiles instead, you risk your exhaust gases will contaminate any samples you take.
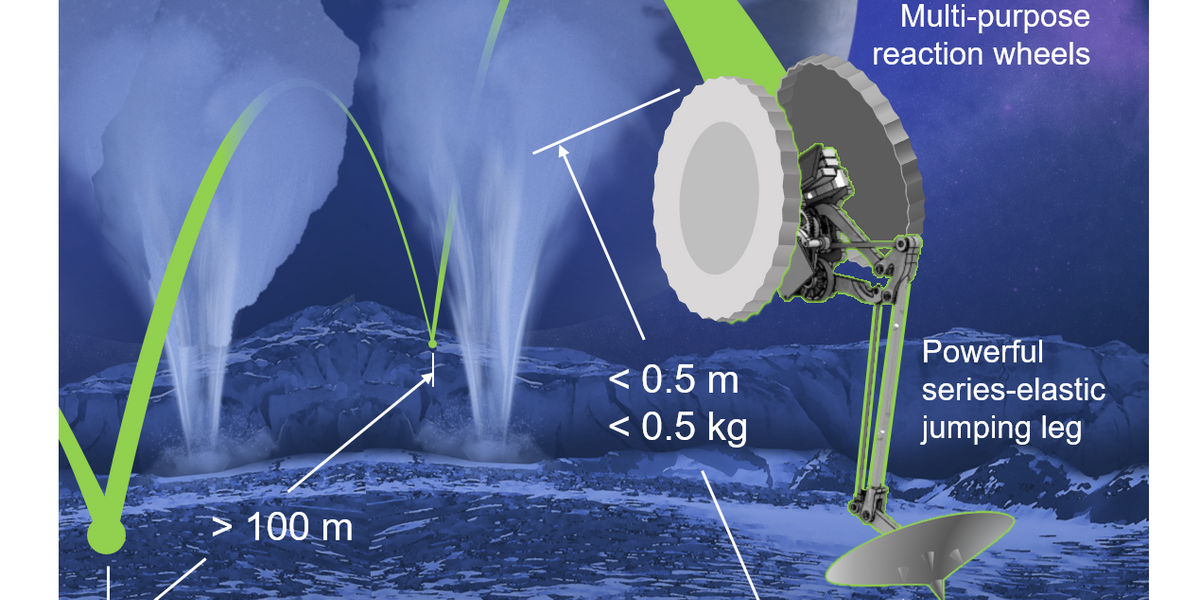
“That doesn’t leave us a lot of ways to do, but the one that seems to be particularly appropriate is jumping,” Yim tells us. “We can cover wide distances, we can get through obstacles, do not require the atmosphere and pollute anything.” And with the fact that Enceladus’s gravity is only 1/80.
Current version of Salto Yes Require the atmosphere because the propeller has been used as small nozzles to control the cure and role. When jumping, these nozzles would instead be replaced by an angular pair of reaction wheels. To deal with the terrain, the robot will probably also need a leg that can handle jumping from (and landing) surface tracks composed of granulalalar ice particles.
 Leap is designed to jump on how “many feathers for collecting samples, and using the Moon field, follow the subsequent jumps.NASA/Justin Yim
Leap is designed to jump on how “many feathers for collecting samples, and using the Moon field, follow the subsequent jumps.NASA/Justin Yim
While the vision is to jump continuously, jumping on the surface and feathers in a controlled series of hops, sooner or later it will have a bad landing and the robot must be ready for it. “I think one of the largest new technological developments will be multimodal locomotion,” Yim explains. “Specifically, we would like to have a robust ability to handle faces.” The reaction wheels can help with this in two ways: they offer some protection by acting as a shell that wakes up a robot, and can also function as a regular pair of wheels, allowing the robot to turn a little on the ground. “With some maneuvers we are now experienced with, reaction wheels can also be able to help the robot to jump back in an upright position so that he can start jumping again after he succeeds,” Yim said.
The NIAC project, as this is, is about the early phase as it gets to something like Leap, and the Enierdus mission is very far, measured almost every metric pass, time, financing, politics, name it. Idea with Leap is that it could be a complement to the concept of the mission called Endadus Orbilandrand. This $ 2.5 billion spacecraft would be released in the thirties of the last century and spent a dozen years to get to Saturn and leave orbit around the location. After 1.5 years in orbit, the spacecraft would land on the surface and spend another 2 years looking for biosignatures. The Orbilander itself would be stationary, explains Yim: “So this solution of robotic mobility would be a great way to carry out the widespread exploration of Engaredus, get really long distances to collect water samples from areas in different areas of the surface.”
Leap was financed through the nine -month study of Phase 1, which starts this year in April. While the JPL team is investigating the interaction of the ice leg and trying to figure out to prevent the robot from freezing, the University of Illinois YIM will upgrade the flue with a separate ability. Frankly, it is exciting to think that after such May years, Salto Finully may have found an application where he offers best news for solving this particular problem with low gravity mobility for science.
From the articles of your site
Related articles around the web
(Tagstotranslate) Salto robot